세 번째 기준 : '로봇 말단이 정확하게 움직여야 하느냐, 카메라와 로봇을 함께 사용하느냐'의 적용
세 번째 기준은 로봇이 정확하게 움직여야 하는지의 여부이다. 로봇이 정확하게 움직이지 않을 수도 있다는 것에 대해서 의아하게 생각할 수도 있지만, 로봇은 당신이 기대한 수준에 따라서 다르지만, 로봇은 당신의 기대보다 정확하게 움직이지 못할 수 있다. 이해의 편의를 위해 상황을 두 가지로 나누어 보자.
상황 1.
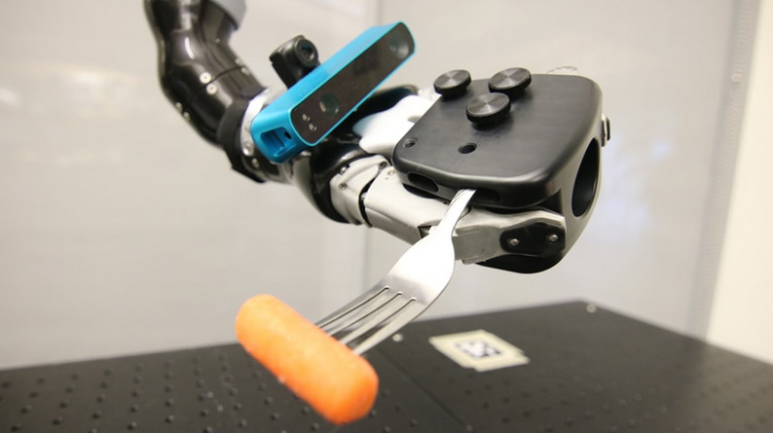
주방 환경에서 카메라를 이용해서 물체(염지 닭 용기, 튀김기, 그릇 등)의 위치를 파악하고, 해당 물체를 로봇이 핸들링한다. 단, 이때 핸들링하는 물체의 위치는 매번 조금씩 바뀌어서 로봇은 카메라를 통해 받아온 물체의 위치 정보를 바탕으로 물체를 집는다.
상황 2.
주방 환경에서 로봇이 핸들링하는 물체는 로봇을 기준으로 항상 일정한 위치에서만 움직이며, 로봇은 카메라 없이 항상 일정한 위치에 있는 해당 물체를 집어 사용한다.
상황 1과 상황 2에서 로봇의 입장에서 느끼는 난이도를 평가해 보자. 당신이라면 어떤 상황이 로봇에게 덜 혼란스러운 상황이라고 생각하는가?
환경의 고정성에 대하여(미작성)
많은 연구자들은 아직도 상황 1에서 로봇이 주어진 과업을 달성하도록 하기 위해서 무진장 연구를 하고 있다. 로봇에게 있어 카메라는 주변 환경을 시각적으로 인식할 수 있는 도구이지만, 현실을 왜곡하여 보여주는 부정확한 감각기관이다. 또한 엄청나게 성능이 좋은 카메라를 이용해서 로봇에게 물체의 정확한 위치를 던져주었다고 하더라도 로봇은 제 팔을 정위치에 못 가져다 놓을 수도 있다. 로봇 팔은 특정 좌표가 주어졌을 때 해당 좌표로 자신의 팔을 가져다 놓는 능력이 생각보다 많이 떨어진다.
따라서 당신이 만약 카메라와 로봇을 결합산 사업을 구상 중이라 면 상당히 실현 가능성을 더더욱 면밀하게 검토해야 한다.
반면 상황 2는 로봇에게는 아주 편한 여건이 주어진 셈이다. 로봇은 시각적인 정보가 없이도 같은 동작을 정밀하게 반복할 수 있다. 대부분의 산업용 로봇과 협동 로봇은 0.02 mm 수준의 반복 정밀도로 로봇을 동작시킬 수 있다. 따라서 주방에서 다루는 도구들이 항상 제자리에 있다는 조건만 보장한다면 로봇은 주어진 과업을 충분히 달성할 수 있다.
우리가 로봇의 정밀함을 말할 때는 상황 2와 같은 여건을 말하는 것이며 이는 반복 작업을 가정한다. 다만, 주의해야 할 점은 로봇의 반복정밀도가 0.02 mm 정도 된다고 하더라도, 반복 작업에서 핸들링하는 물체의 무게가 달라지면 정밀도가 달라질 수 있음에 주의해야 한다. 왜냐하면 로봇은 강체가 아니기 때문에 무게에 의해서 처짐이 발생할 수 있기 때문이다.
만일 당신이 상황 2에서 로봇을 구동하면서 동시에 로봇의 초정 밀성을 요구한다면 로봇을 구매할 때 핸들링하는 무게가 바뀌었을 때도 보장하는 정밀도가 어느 정도 수준인지를 반드시 문의해야 한다.
그렇다면 상황 1과 비슷한 서비스 환경을 구상하였다면 도대체 어떻게 해야 하는가? 아쉽지만 구상을 접어야 하는가?
이런 상황에서 사용하기 위한 로봇을 구매하려면 당신은 반드시 판매자에게 해당 로봇이 위치정확도를 어느 정도 보장하는지를 정확하게 물어보아야 한다. 그런데 판매자에게 위치정확도에 대해서 문의했을 때 반복정밀도를 알려주는 경우가 있다. 이는 판매자도 위치정확도에 대한 개념이 없는 경우가 있기 때문인데, 이 것은 판매자가 소비자를 속이려고 한다기보다는 몰라서일 가능성이 더 크다. 왜냐하면 로봇 제조사에서 제공하는 스펙시트에 조차 반복정밀도는 제공하지만 위치정확도를 제공하지 않는 경우가 많기 때문이다.
반복정밀도와 위치정확도의 구분(미작성)
반복정밀도와 위치정확도 평가 기준(ISO 9283)(미작성)
이는 지금까지는 산업현장에서 로봇의 위치정확도가 필요한 상황에서 로봇을 사용하는 경우가 많지 않았기 때문일 것으로 추측한다. 그리고 별 것 아닌 것 같지만, 반복정밀도에 비해서 위치정확도 성능은 높이기 어렵기 때문일 것이다.
위치 정확도 및 반복정밀도를 보정하기 위한 로봇 캘리브레이션(미작성)
따라서 당신이 로봇을 사용하려는 시나리오가 상황 1에 해당하는지 2에 해당하는지를 명확히 하고 로봇을 구매하길 바란다.
2탄 종합
2탄에서는 로봇으로 치킨을 튀기고 싶은 상황을 상정하여 어떤 로봇을 사야 하는지에 대해서 가장 기본적인 스펙(들 수 있는 무게, 뻗을 수 있는 범위, 꺾을 수 있는 각도)들과 함께 3가지 요소(사용하는 도구, 힘 제어 사용 여부, 위치정확도 필요 여부)에 대해서 알아보았다.
로봇으로 치킨을 튀기려면 어떤 로봇을 사야 할까?
|
Payload(들수있는 무게) |
치킨반죽통 ( ~ 5kg) 튀김바스켓 ( ~ 5kg) 플레이트 (~ 5kg) |
|
Reach (닿을수 있는 거리) |
주방조리대 범위 반경 (~ 150 cm) |
|
Joint Limit (관절가동범위) |
범위가 넓을수록 좋음 |
|
제공하는 Tool I/O (어떤툴사용) |
선택의 영역임 공압 그리퍼를 사용하면 공압 라인이 내재된 것이 좋음 전기그리퍼를 사용하려면 사용하려는 전기 그리퍼와 호환되는지 확인 기구적으로 잘 설계된 전기, 공아이 필요없는 툴체인저를 사용가능 |
|
힘제어 필요 여부 |
위에 정의된 치킨을 튀기는 작업만 하는데 힘제어 필요 없음 튀김기 주변이나, 플레이트 주변을 걸레질 하려면 필요함. |
|
초정밀 필요 여부 |
조리도구들의 위치와 플레이트 위치가 항상 고정되어 있어야 함. 초정밀 필요 없음 일반적인 협동로봇 수준이면 됨. 치킨 튀기면서 들어야 하는 도구의 무게를 들고도 아무것도 들지 않았을 때의 반복정밀도를 유지할 수 있으면 ok |
3탄에서는 추가적인 성능 요소를 분석해 보겠다.
로봇 치킨집 사장님은 알아야 할 로봇 지식-3탄(미작성)
3탄 - 로봇으로 하는 작업에 대한 분석 기준2
4. 서비스 환경이 열과 습기가 있는 환경이냐? (로봇 수명, 유지보수)
5. 로봇을 여러 대 사용하고, 로봇끼리 합이 맞아야 하는가? (다중로봇, 관제시스템)
6. 사람과의 작업 공간이 얼마나 겹치나? (안전기능)
이 글은 로보틱스 이론과는 무관하지만, 로봇을 사용하는 관점에서 알고 있으면 좋을 스펙들에 대한 소개를 목적으로 작성하였습니다. 구체적인 로봇을 활용한 어플리케이션 사례를 들어 관련된 내용에 대한 직관적인 이해를 돕고자 노력을 하였습니다. 개중에 사실과 다른 내용이 있을수 있으니, 지적해주시면 배움의 기회로 삼도록 하겠습니다.
'로봇팔을 알고싶다' 카테고리의 다른 글
| 005. 로봇 치킨집 사장님은 알아야 할 로봇 지식-2탄(1) (0) | 2021.04.23 |
|---|---|
| 004. 로봇 치킨집 사장님은 알아야 할 로봇 지식-1탄(2) (0) | 2021.04.23 |
| 003. 로봇 치킨집 사장님은 알아야 할 로봇 지식-1탄(1) (0) | 2021.04.23 |
| 002. 방향과 좌표계에 대해서.. (2) (0) | 2021.03.27 |
| 001. 방향과 좌표계에 대해서.. (1) (0) | 2021.03.27 |