두 번째 기준 : '로봇으로 일정한 힘을 유지해야 하는 작업이 있냐?'의적용
두 번째 기준은 로봇 수행하는 작업 중 핸들링하는 대상물에 일정한 힘을 가하는 작업이 있는지의 여부이다.
힘 제어란?(미작성)
힘 제어 이론(미작성)
위에서 정한 치킨을 튀기는 작업을 할 때 로봇이 물리적으로 외부와 접촉을 하는 경우는 다음의 세 가지 정도가 된다.
1. 튀김옷을 입은 염지닭이 담긴 통을 집을 때와 놓을 때
2. 튀김기에서 치킨을 건져 내기 위해서 튀김 바스켓을 집을 때와 놓을 때
3. 접시를 집을 때와 놓을 때
위에서 제시한 세 가지 경우 중 로봇이 일정한 수준의 힘을 유지해야 하는 경우가 있는가? 만일 로봇이 일정한 힘을 유지해야 한다면 로봇을 이용한 힘 제어를 사용해야 하는데, 다행히(?)도 치킨을 튀기면서 로봇이 힘 제어를 사용할 일은 없다.
힘 제어는 쉽게 말해서 로봇이 외부와 물리적으로 접촉한 상태에서 일정 수준의 힘으로 누르거나 당기거나, 잡아 비트는 것을 말한다. 여기서 중요한 점은 일정 수준의 힘을 조절할 수 있다는 것이다.
목욕탕에서 때를 밀거나, 마사지를 받는 경우 때를 너무 세게 밀거나, 마사지를 너무 세게 하면 아프다는 것을 느낄 수 있다. 그렇지만 어느 정도로 세기인지에 대해서 우리가 말을 할 때는 지금 하는 세기에서 좀 더 세게 와 좀 더 약하게라고 말할 뿐이지, 10N의 힘으로, 15N의 힘으로 와 같이 말하지는 않는다.
재밌는 것은 로봇은 기계니까 이러한 것이 별 것 아닌 것으로 느껴질 수 있지만 로봇에게 일정 크기의 힘으로 물체와 접촉을 유지하도록 하려면 돈이 많이 든다는 점이다. (예전에는 조금 많이 드는 것도 아니고 엄청 많이 들었다.)
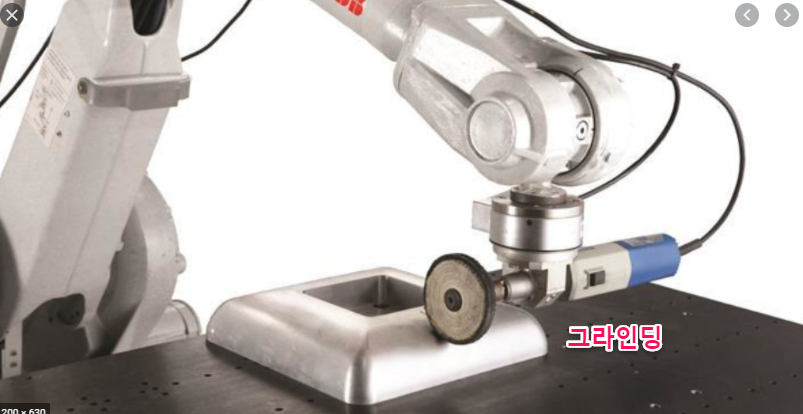
힘 제어가 필요한 작업들을 찾아보면 일상생활에서는 걸레질이나, 칠판 지우기, 붓글씨 쓰기 같은 것이 있고 공장에서는 디버링, 그라인딩 같은 작업들이나 정밀조립 등이 있다.
힘 제어가 필요한 작업들(미작성)
위 작업들을 보면 하나같이 로봇이 적절한 힘으로 물체를 누르면서 움직여야 하는 것들이다. 예전에는 힘 제어를 구현하는데 힘센서(FT센서)를 이용했다. 이 FT센서가 무지 비쌌다. (ATI 社 의 최저가 모델이 500 ~ 600 만원 정도, 정밀한 모델은 1000만 원 이상) 공장에서 쓰는 로봇이 한 대에 1500만 원 정도 하는데, 단가가 너무 올라가서 꼭 필요한 곳 아니면 힘 제어를 사용하지 않았다.

공장이 아니라 서비스용 로봇 사업을 구상하는데 누가 걸레질이나 칠판 닦기, 붓글씨 쓰기를 하려고 500만 원을 더 쓰겠는가? 혹시라도 때밀이 로봇이나, 지압 로봇과 같은 서비스를 생각하고 있는가? (필자가 든 사례는 극히 제한적이고, 돈이 될 것 같지 않아 보인다. 사업을 구상하는 입장에서는 더 다양한 상황들을 상정할 수 있고 힘 제어로 수지타산이 맞는 아이디어가 충분히 많이 있을 것이다. 아이디어가 있으면 공유를 부탁합니다.)
다행히도 요즘에는 저가의 FT센서들이 많이 나오고 있고, FT센서가 없이도 힘 제어를 구현할 수 있는 알고리즘들이 개발되어 협동 로봇에 사용되고 있다. (성능은 센서를 쓰는 것이 좋지만, 많은 작업들이 협동 로봇 자체적으로 제공하는 힘 제어 성능으로도 커버가 되는 경우가 많다.)
FT센서란? 로드셀과 다른 점은?(미작성)
힘 제어를 사용하는 것은 로봇의 활용도를 많이 높이는 것이다. 이 것은 로봇을 단순히 허공에서 도구를 정해진 위치에 옮기는 수준을 넘어서서, 로봇이 도구를 더 감각적으로 다루게 되는 것을 의미한다. 때문에 FT센서 없이 로봇 자체 성능으로서 힘 제어 구현이 가능한 협동 로봇이 있다면 그렇지 않은 협동 로봇에 비해 가격차이가 크게 발생할 수 있다.
따라서 치킨을 튀길 때와 같이 힘 제어가 필요가 없는 경우에는 비싼 협동 로봇을 구매할 필요가 없기 때문에, 구상하고 있는 서비스에서 힘 제어를 필요로 하는지 여부를 반드시 판단해보길 바란다.
이 글은 로보틱스 이론과는 무관하지만, 로봇을 사용하는 관점에서 알고 있으면 좋을 스펙들에 대한 소개를 목적으로 작성하였습니다. 구체적인 로봇을 활용한 어플리케이션 사례를 들어 관련된 내용에 대한 직관적인 이해를 돕고자 노력을 하였습니다. 개중에 사실과 다른 내용이 있을수 있으니, 지적해주시면 배움의 기회로 삼도록 하겠습니다.